Cách thiết lập Position Hold và Altitude Hold trong Betaflight
Một trong những tính năng mới thú vị nhất ở Betaflight phiên bản 2025.12 có lẽ là GPS Position Hold và Altitude Hold. Bật một công tắc và drone FPV của bạn có thể neo ở một vị trí mà không cần chạm—rất hữu ích cho các tình huống khẩn cấp, cũng như cho bay đường dài.
Hình dung có người tiến tới bạn khi đang bay: bạn có thể dừng ngay lập tức để trò chuyện với họ. Hoặc nếu bạn cảm thấy mệt giữa chuyến bay, bạn có thể tháo kính FPV của mình và uống một ngụm nước trước khi tiếp tục. Đây là một tính năng tuyệt vời, nhưng nó đòi hỏi cài đặt đúng và nên được sử dụng thận trọng. Trong hướng dẫn này, tôi sẽ chỉ cho bạn cách thiết lập và chia sẻ những gì tôi đã học được từ việc thử nghiệm nó.
Video thử nghiệm
Xem một số đoạn video cho thấy Position Hold hoạt động tốt như thế nào trong Betaflight:
Tài liệu chính thức
Tôi sẽ cố gắng giữ hướng dẫn ngắn gọn, nhưng bạn cũng nên xem tài liệu chính thức được viết bởi các nhà phát triển Betaflight:
https://www.betaflight.com/docs/wiki/guides/current/Position-Hold-2025-12
Yêu cầu phần cứng
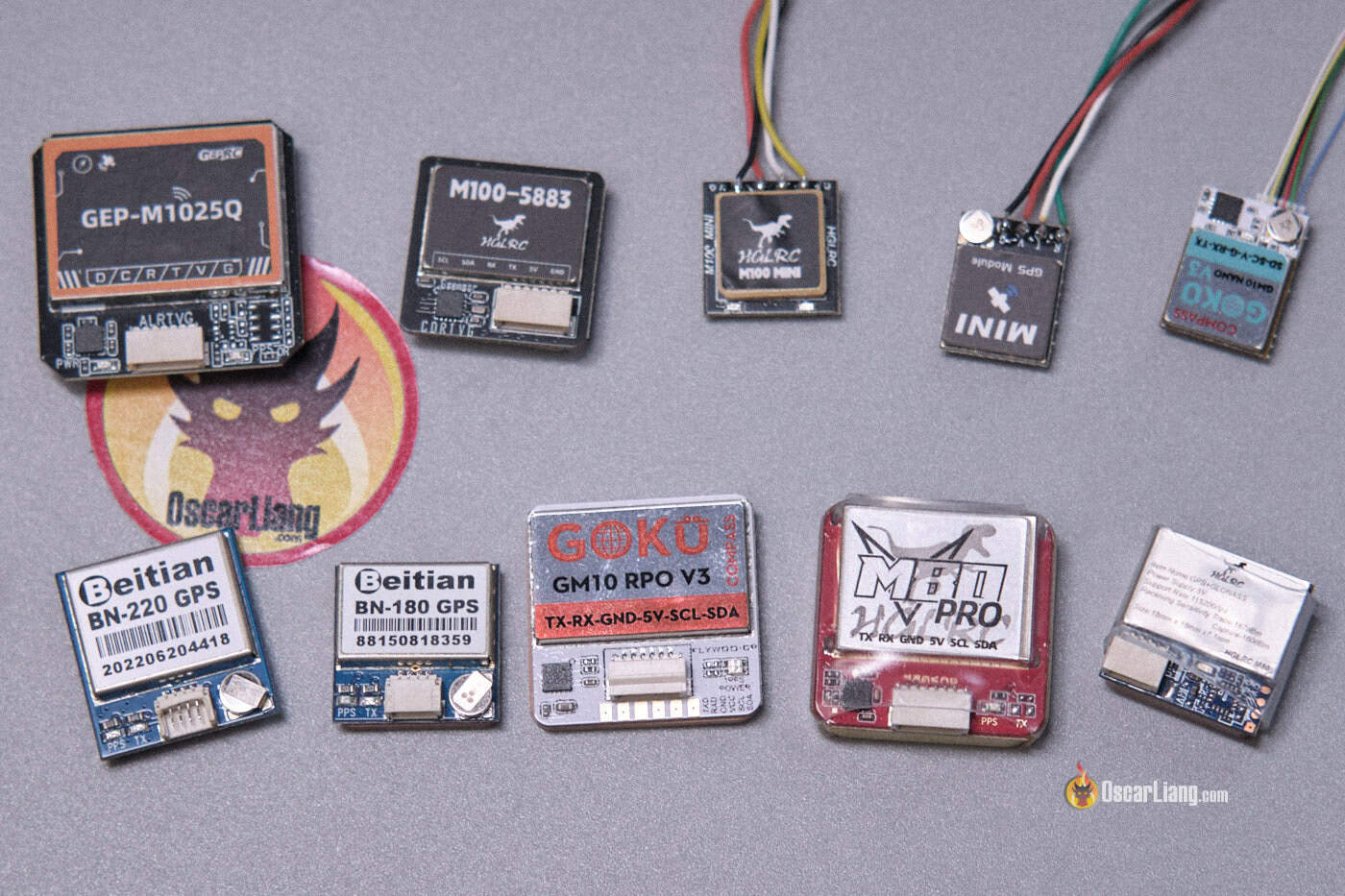
Để Altitude Hold và Position Hold hoạt động, tất cả những gì bạn cần là một module GPS (áp kế và cảm biến từ trường là tùy chọn).
Nhiều bộ điều khiển bay ngày nay cũng có cảm biến áp suất (barometer). Nếu thiết bị của bạn không có, điều đó cũng không phải là tận cùng thế giới—Position Hold vẫn hoạt động, vì GPS cũng cung cấp dữ liệu độ cao. Tuy nhiên, một cảm biến áp suất thường chính xác hơn và phản hồi nhanh hơn so với các module GPS cho ước lượng độ cao bằng cách đo áp suất không khí, dẫn đến kiểm soát độ cao chính xác hơn và hạ cánh đáng tin cậy hơn.
Và nhớ rằng, nếu bạn đang phủ lớp conformal coating để chống nước, hãy tránh phủ lên cảm biến áp suất (barometer), vì điều này có thể gây ra các đọc độ cao không chính xác.
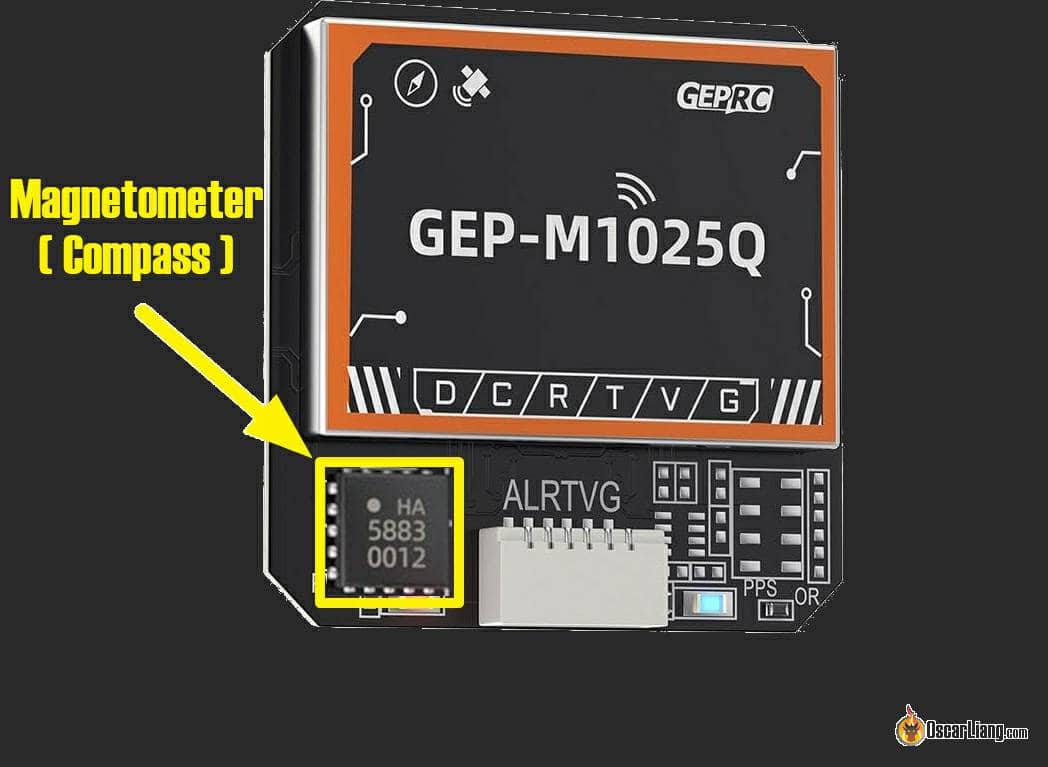
Bạn có thực sự cần cảm biến từ trường không?
Một số module GPS đi kèm với cảm biến từ trường (còn được gọi là la bàn). Trong khi nó có thể cải thiện độ chính xác của Position Hold, nó không bắt buộc.
Tôi đã thử nghiệm Position Hold cả khi có và không có la bàn, và sự khác biệt về hiệu suất không lớn như tôi ban đầu mong đợi.
Lợi thế chính của việc có la bàn là bạn có thể kích hoạt Position Hold ngay sau khi cất cánh, và nó thường giữ hướng bay chính xác hơn trong suốt toàn bộ chuyến bay.
Không có la bàn, bạn không thể kích hoạt Position Hold ngay lập tức—bạn cần bay thẳng về phía trước trong vài giây đầu tiên, nếu không bạn sẽ nhận được lỗi “Position Hold Fail”. Điều này là vì Betaflight cần chuyển động tiến về phía trước để ước lượng hướng. Nó cũng dùng con quay để theo dõi hướng. Vì con quay có thể lệch theo thời gian, độ chính xác của hướng có thể giảm dần, khiến drone bị trôi.
Tuy nhiên, trong quá trình thử nghiệm của mình, quad giữ được vị trí và hướng khá ổn trong gần 8 phút ngay cả khi không có la bàn. Thực tế mà nói, đó là đủ cho hầu hết người dùng, vì nó kéo dài hơn thời lượng pin thông thường.
Nơi gắn GPS
Bạn nên đặt GPS càng xa càng tốt khỏi các nguồn nhiễu sau:
Ăng-ten VTX
ESC, động cơ và dây động cơ
Dây nguồn (ví dụ XT60)
Máy ảnh hành động (ví dụ như GoPro)
Vị trí lắp đặt GPS tốt bao gồm:
Ở trên camera FPV
Ở phía sau của drone (miễn sao không quá gần với các ăng-ten VTX)
Trên dây đai pin



Cách kết nối GPS với FC
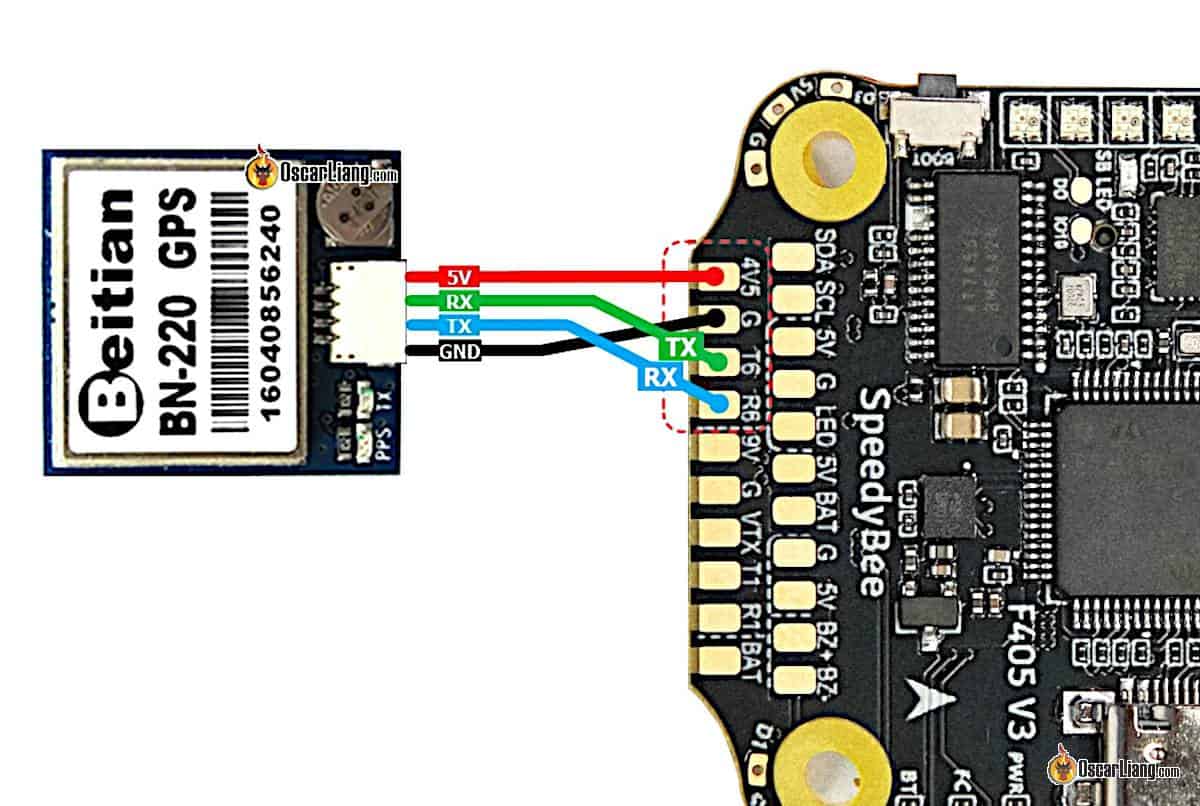
Kết nối một module GPS với FC tương đối đơn giản. Chỉ cần kết nối nó tới một UART có sẵn trên FC (TX tới RX, RX tới TX), và cấp nguồn bằng 5V. Nếu bạn có một la bàn, bạn cũng cần kết nối cổng i2c (dây SDA và SCL):
GPS RX → FC TX
GPS TX → FC RX
GPS 5V → FC 5V
GPS GND → FC GND
GPS SDA → FC SDA (nếu GPS có la bàn)
GPS SCL → FC SCL (nếu GPS có la bàn)
Nhắc nhở: Tránh sử dụng SoftSerial cho kết nối GPS. SoftSerial bị giới hạn ở tốc độ baud 19200, điều này quá chậm và có thể làm giảm độ tin cậy của GPS—đặc biệt đối với các tính năng như Rescue Mode và Position Hold. Luôn sử dụng UART phần cứng cho hiệu suất ổn định và đáng tin cậy nhất.
Cập nhật Betaflight
Flash Betaflight lên phiên bản 2025.12 hoặc mới hơn.
Quan trọng: Để flash và cấu hình firmware mới nhất, bạn phải dùng ứng dụng web Betaflight, không phải ứng dụng desktop độc lập:
https://app.betaflight.com/
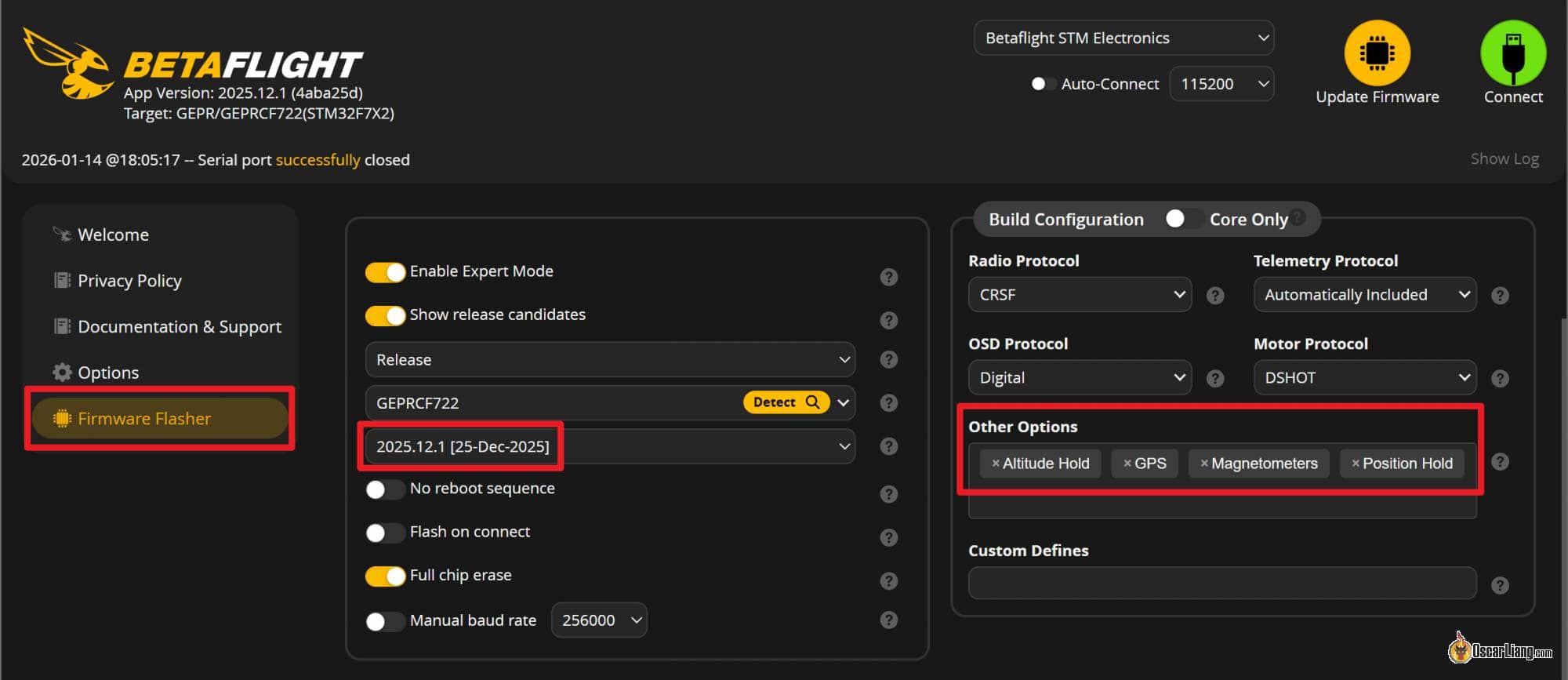
Khi chọn các tùy chọn build, hãy đảm bảo các tính năng sau được bật:
Altitude Hold
Position Hold
GPS
Cảm biến từ trường (nếu bạn đang sử dụng la bàn)
Không chắc cách flash Betaflight? Xem hướng dẫn này: https://oscarliang.com/flash-update-betaflight/
Cài đặt Betaflight
Tab Cổng
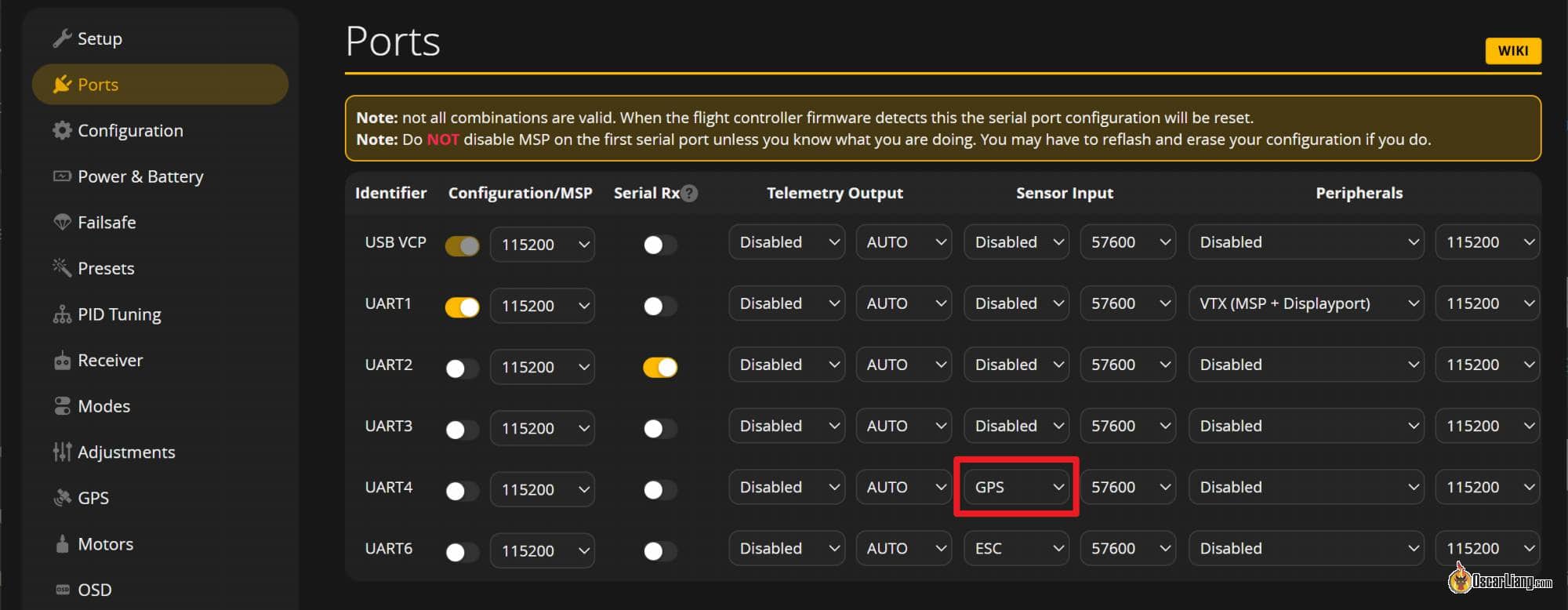
Bật GPS trên UART mà module GPS được kết nối.
Tab Cấu hình
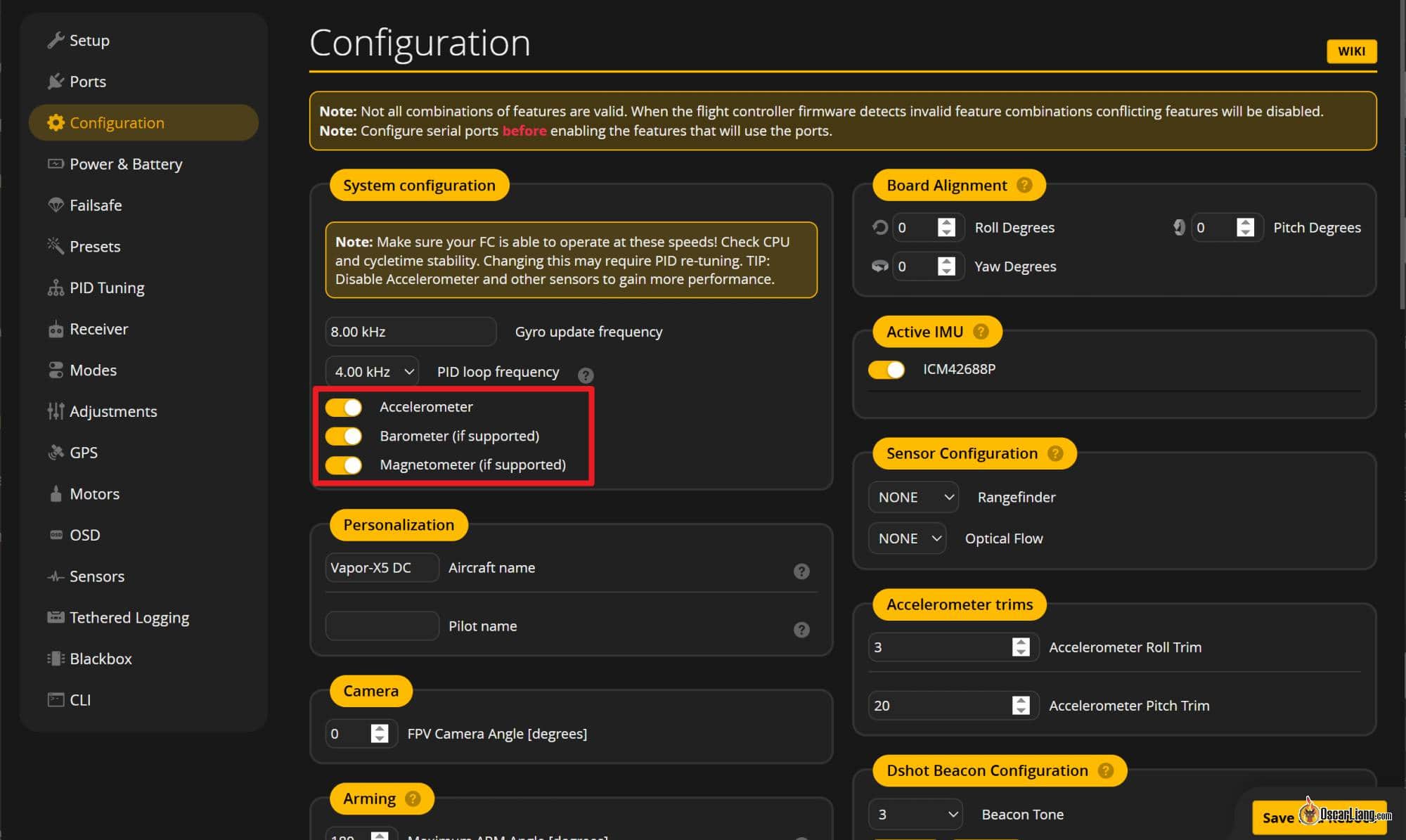
Kích hoạt các tùy chọn sau:
Gia tốc kế (CẦN được bật)
Áp kế (nếu bạn có một cái)
Nam kế (nếu bạn có một cái)
Nếu bạn không sử dụng nam kế, hãy nhập lệnh sau vào CLI:
set pos_hold_without_mag = ONsave
Tab GPS
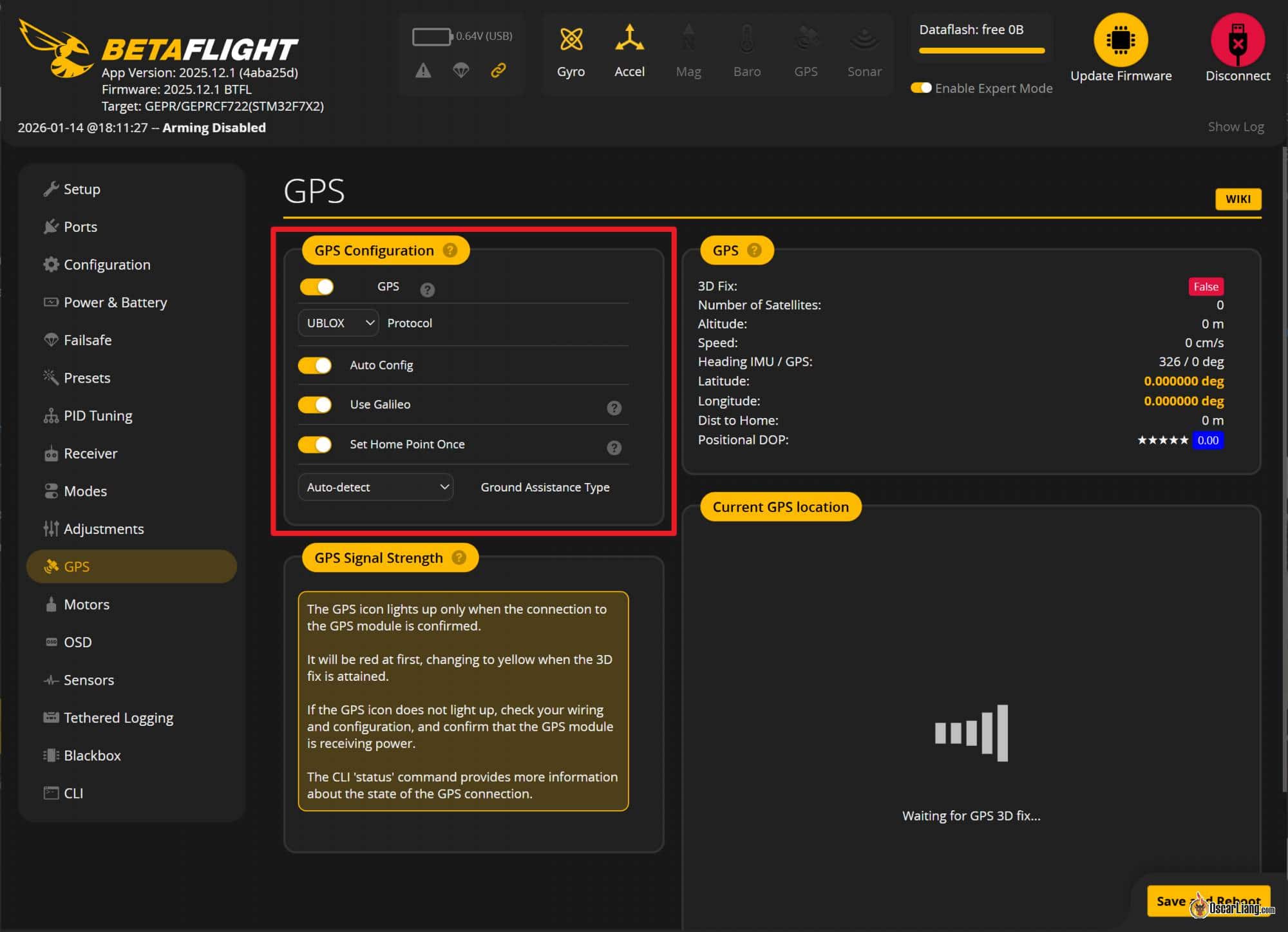
Đây là cài đặt của tôi cho module GPS.
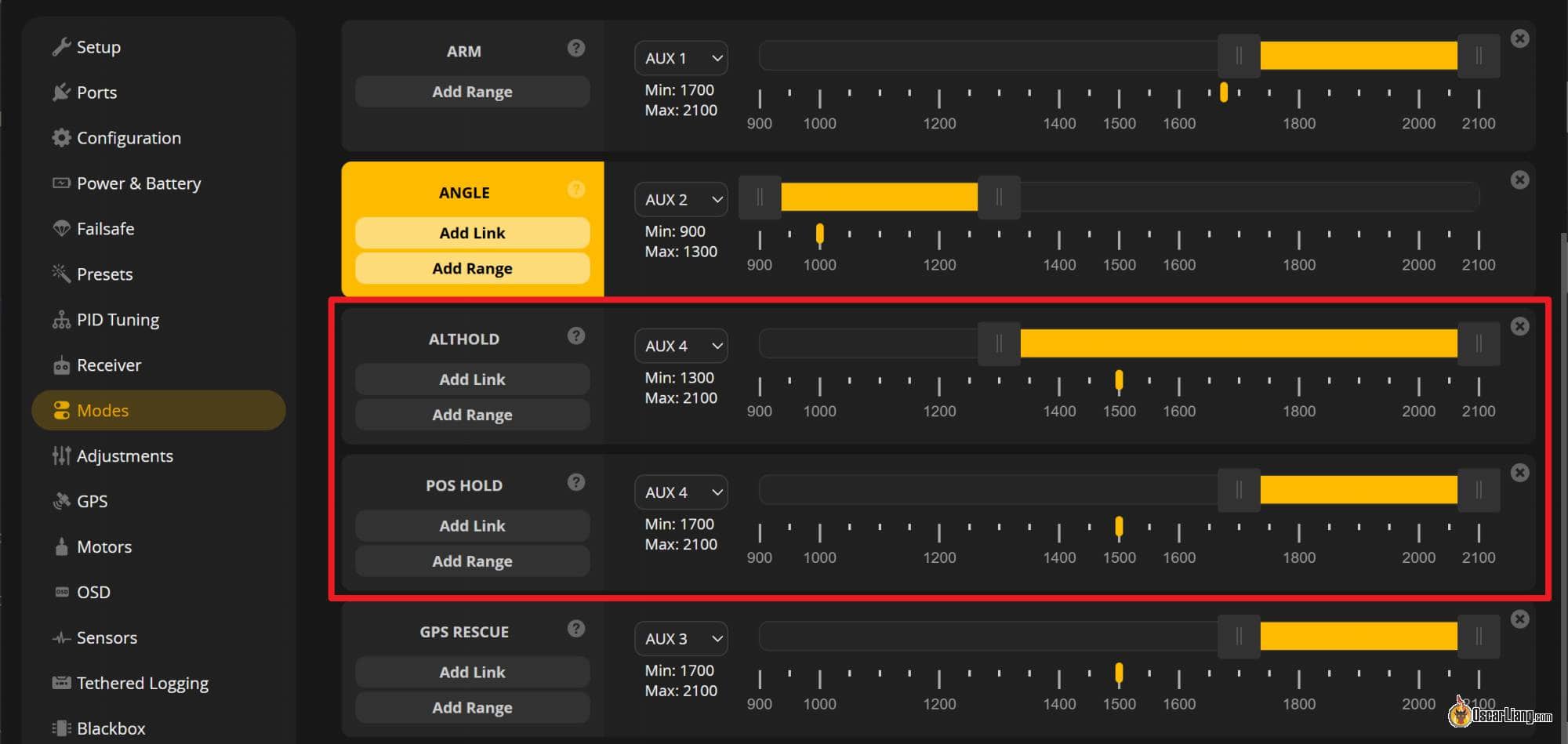
Tab Chế độ
Khuyến nghị nên dùng Giữ độ cao và Giữ vị trí cùng lúc, vì vậy tôi gán chúng cho cùng một công tắc.
Giữ độ cao: ALTHOLD
Giữ vị trí: POS HOLD
Tôi dùng một công tắc 3 vị trí:
Vị trí 1: Cả hai chế độ TẮT
Vị trí 2: Giữ độ cao BẬT
Vị trí 3: Giữ độ cao + Giữ vị trí BẬT
Thiết lập này cho phép bạn kiểm tra hoặc sử dụng Giữ độ cao độc lập khi cần.
Tab OSD
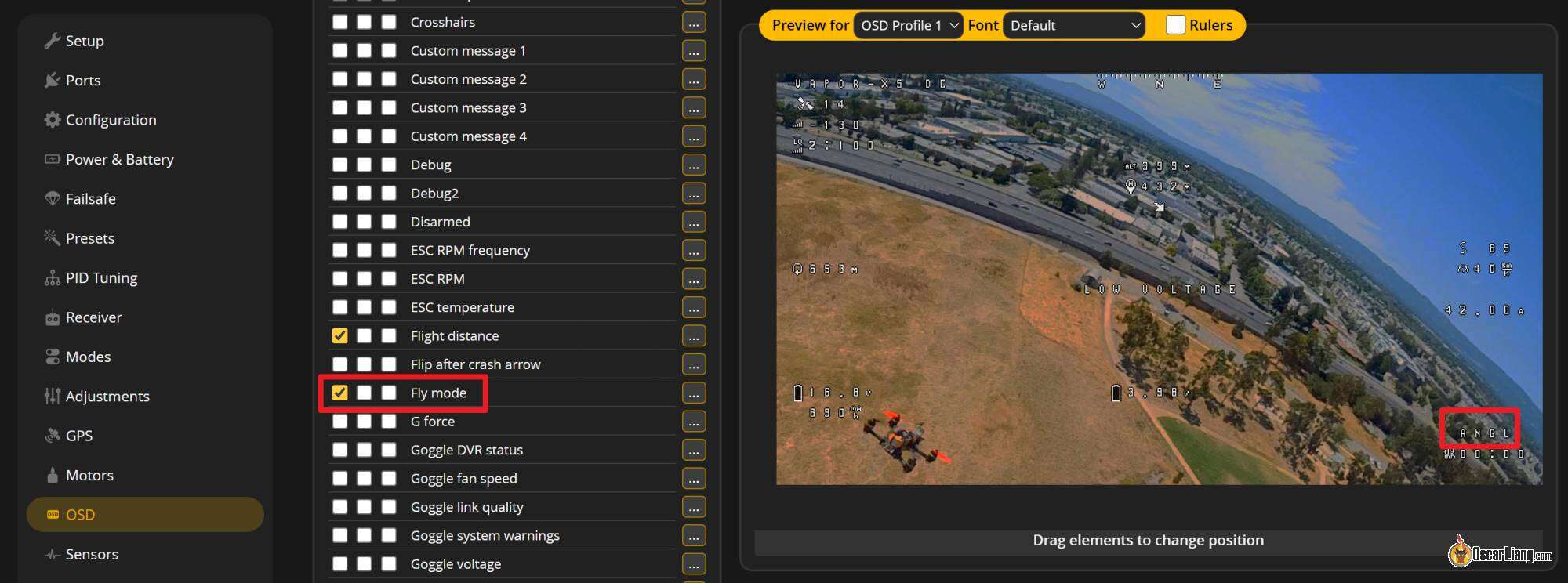
Bật “Fly Mode” để bạn có thể thấy rõ chế độ nào đang hoạt động.
Mũi tên “Home Direction” cũng rất hữu ích để xác nhận hướng—đặc biệt là khi bạn bay mà không có la bàn.
Throttle Hover
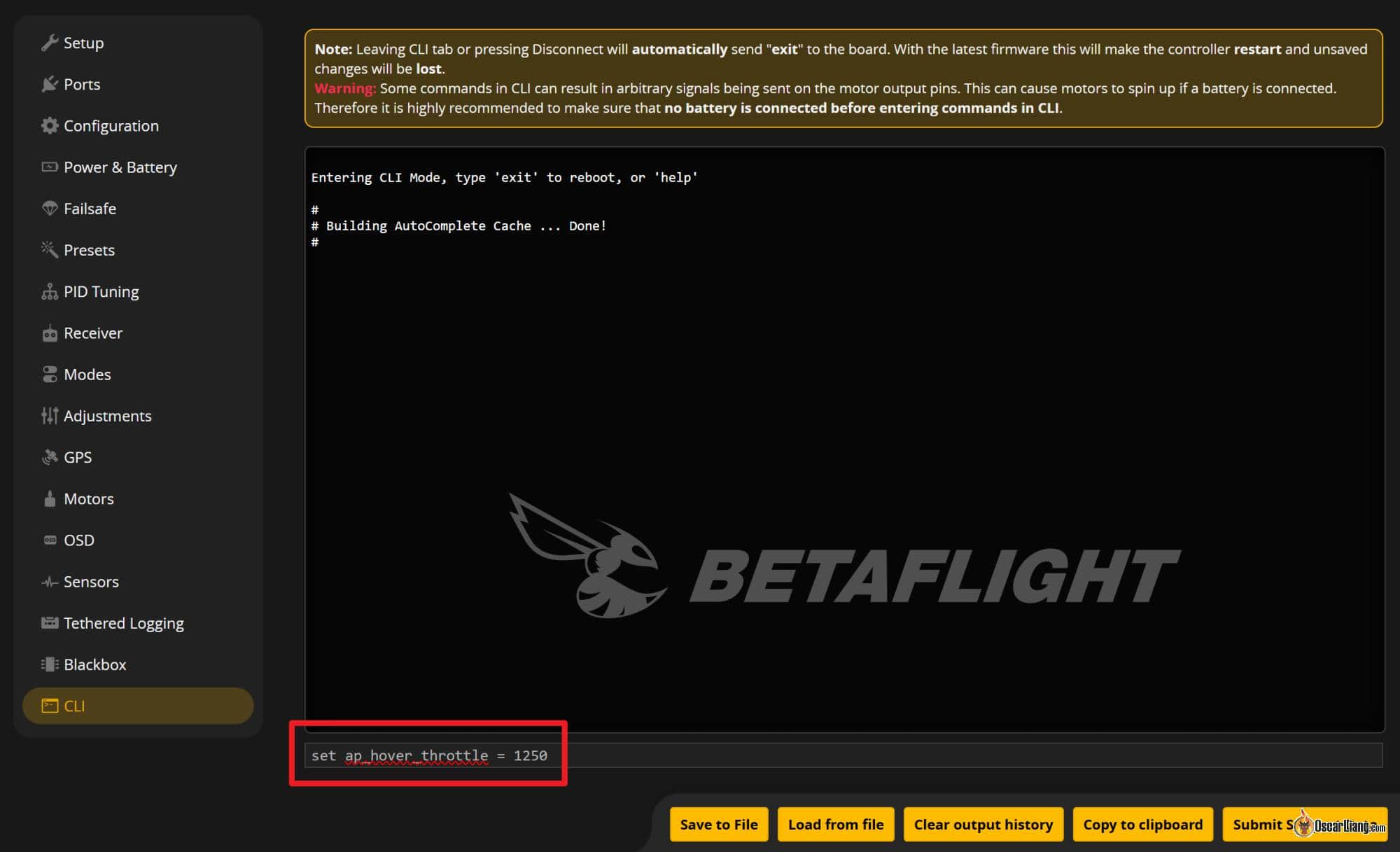
Cuối cùng, hãy vào tab CLI, và thiết lập giá trị throttle giữ ở trạng thái Hover (đây là cùng giá trị được sử dụng cho chế độ GPS Rescue, nhân tiện):
set ap_hover_throttle = 1275save
Thay 1275 bằng giá trị throttle giữ ở hover của bạn dựa trên kiểm tra. Bạn có thể cần hiệu chỉnh nó vài lần, không nhất thiết phải trùng hoàn toàn với giá trị bạn thấy ở OSD.
Hiệu chuẩn Gia tốc kế
Giống như Rescue Mode, cả Position Hold và Altitude Hold dựa vào Angle Mode, sử dụng gia tốc kế. Do đó, bạn nên hiệu chuẩn gia tốc kế trước khi sử dụng các chế độ này để giảm thiểu drift.
Đặt drone của bạn lên bề mặt phẳng, sau đó vào tab Setup và nhấp Calibrate Accelerometer.

Để kiểm tra Angle Mode, hãy thử giữ drone ở trạng thái treo và xem nó có tự cân bằng như mong đợi hay không. Hãy nhớ Angle Mode chỉ dùng gia tốc kế và gyro, nên nó sẽ không giữ vị trí hoàn hảo như một drone DJI. Đó chính là lý do tại sao chúng ta thiết lập Position Hold.
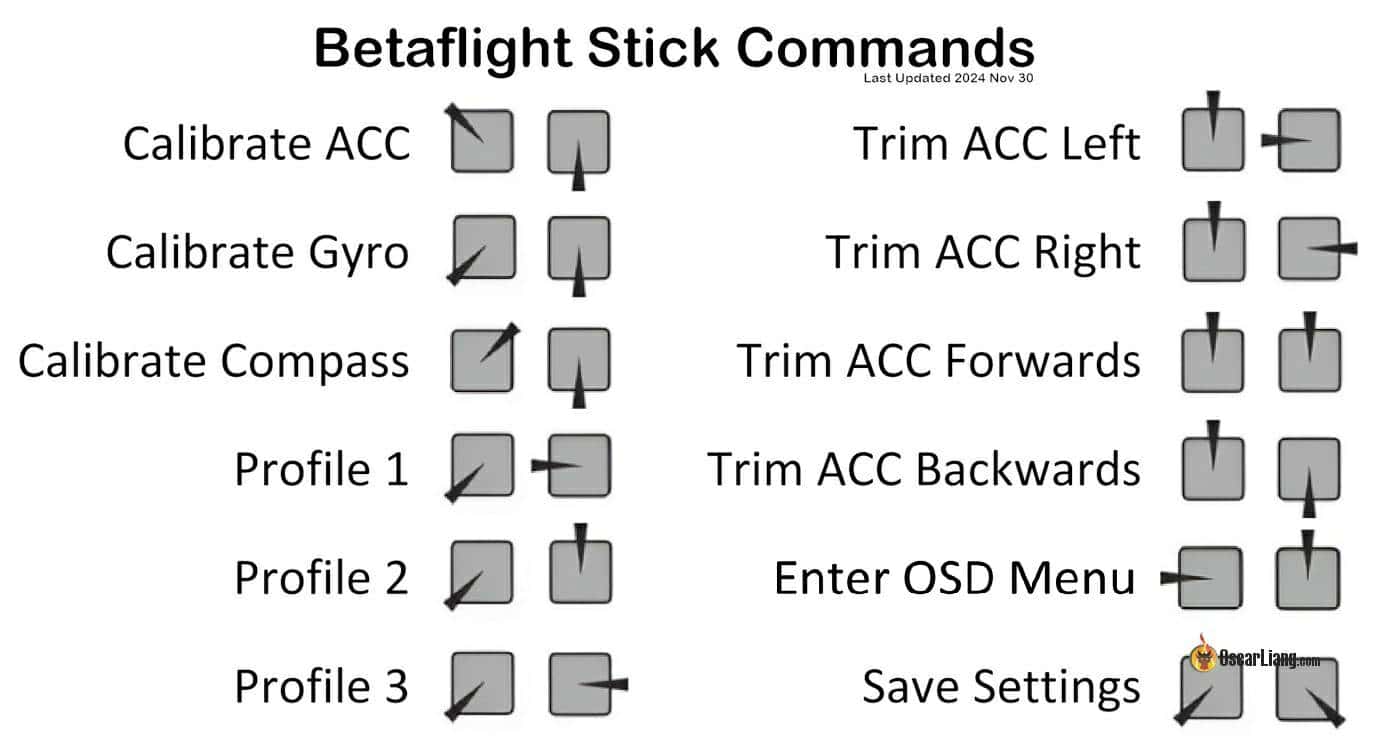
Một chút drift do lỗi cảm biến, phân phối trọng lượng hoặc gió là bình thường. Bạn có thể giảm thiểu bằng cách hiệu chỉnh gia tốc kế bằng các lệnh điều khiển sau khi hạ cánh, hiệu chỉnh ngược với hướng drift, ví dụ:
Nếu drone lệch sang trái, hãy dùng Trim ACC Phải
Nếu nó lệch về phía sau, hãy dùng Trim ACC Tiến về phía trước
Khó có thể loại bỏ drift hoàn toàn. Mục tiêu là giảm thiểu nó — miễn drift không quá nhiều, nó sẽ ổn.
Hiệu chuẩn Nam kế
Bạn có thể bỏ qua phần này nếu bạn không sử dụng nam kế.
Nếu bạn đang sử dụng nam kế, đây là hướng dẫn: https://.oscarliang.com/setup-calibrate-compass-betaflight/
Cách sử dụng Giữ độ cao
Bây giờ chúng ta đã sẵn sàng thử các chế độ bay này.
Chế độ Giữ độ cao có thể được kích hoạt độc lập với Giữ vị trí.
Một khi được kích hoạt, Chế độ Giữ độ cao hoạt động tương tự như Angle Mode (tự cân bằng), nhưng với kiểm soát ga tự động. Khi cần gạt ga ở giữa, drone sẽ cố gắng duy trì một độ cao cố định. Bạn cũng có thể đưa ga xuống hết 0%, nó sẽ làm cùng một điều.
Nếu bạn tăng hoặc hạ ga khỏi trung tâm, drone sẽ lên hoặc xuống.
Tuy nhiên, giống như Angle Mode, drone vẫn sẽ bị drift, và bạn sẽ cần sửa drift đó bằng cách dùng cần gạt pitch và roll. Điều này là bình thường và dự kiến.
Quan trọng: Việc thiết lập đúng giá trị hover throttle là rất quan trọng. Nếu giá trị quá thấp, quad sẽ rơi ngay khi kích hoạt Altitude Hold. Nếu giá trị quá cao, quad sẽ ngay lập tức tăng lên. Bạn có thể điều chỉnh hover throttle trong menu OSD dưới GPS Rescue, hoặc qua CLI bằng cách sử dụng thiết lập ap_hover_throttle.
Cuối cùng, đừng kỳ vọng độ ổn định độ cao ở mức DJI. Altitude Hold trong Betaflight chỉ sử dụng cảm biến áp suất để ước lượng độ cao, nên lên xuống một chút là bình thường.
Cách sử dụng Giữ vị trí
Để sử dụng Position Hold, nên kích hoạt Altitude Hold đồng thời, tốt nhất là dùng cùng một công tắc.
Trước khi thử Position Hold, bạn nên thử Altitude Hold trước. Đảm bảo không có sự rơi hoặc leo bất thường độ cao khi bạn kích hoạt nó. Nếu quad ngay lập tức leo hoặc chìm, hãy điều chỉnh hover throttle trước.
Khi Altitude Hold hoạt động mượt, bạn có thể chuyển sang thử Position Hold.
Khi Position Hold hoạt động, chế độ bay OSD sẽ hiển thị POSH.

Sử dụng Position Hold Với La bàn
Nếu bạn đang sử dụng nam kế (la bàn), bạn có thể kích hoạt Position Hold bất cứ lúc nào trong chuyến bay, miễn là bạn có tín hiệu GPS ổn (tối thiểu 8 vệ tinh) trước khi cất cánh.
Khi đã kích hoạt, quad sẽ tự động giữ vị trí của nó. Một chút drift — thường nằm trong khoảng 1m — là bình thường theo các nhà phát triển Betaflight.
Bạn vẫn có thể di chuyển quad bằng các cần gạt pitch, roll và yaw, tương tự Angle Mode, nhưng độ nhạy của cần gạt sẽ bị giảm đáng kể so với Angle Mode bình thường.
Sử dụng Position Hold mà không có La bàn
Nếu bạn không sử dụng la bàn, Position Hold sẽ không có sẵn ngay sau khi cất cánh.
Nếu bạn cố kích hoạt nó quá sớm, bạn sẽ thấy cảnh báo “POSHOLD FAIL” ở OSD. Bạn phải bay thẳng một vài giây (hoặc khoảng 100 mét) để Betaflight có thể ước lượng hướng từ dữ liệu GPS.

Để xác nhận bạn đã sẵn sàng, hãy kiểm tra mũi tên home ở OSD—nếu nó chỉ về đúng hướng, Position Hold nên hoạt động.
Trong thử nghiệm của tôi, Position Hold hoạt động khá tốt ngay cả khi không có la bàn. Quad đã giữ vị trí và hướng trong hơn 7 phút, cho đến khi pin cạn (có thể kéo dài lâu hơn). Tuy nhiên, nếu drift bắt đầu xảy ra, bạn có thể cần ngắt Position Hold, bay thẳng lại briefly để làm mới ước lượng heading, rồi kích hoạt nó lại. Đây là nhược điểm chính của việc không có la bàn.
CCó phải đây giống với Nút Panic của DJI không?
Chưa hẳn.
Trên DJI Avata 2, nhấn nút khẩn cấp ngay lập tức phanh và dừng máy bay không người lái gần như ngay lập tức. Chế độ Giữ vị trí hoạt động tương tự, nhưng không quá gay gắt, đặc biệt khi bạn bay với tốc độ cao.
Nếu bạn muốn phanh mạnh hơn, bạn có thể tăng giá trị ap_max_angle (mặc định là 50°, tối đa là 70°). Các giá trị cao hơn dẫn đến hành vi phanh mạnh hơn.
Vấn đề tiềm ẩn và Khắc phục sự cố
Quad của bạn không thể kích hoạt
Bạn không thể kích hoạt quad trong khi Chế độ Giữ vị trí hoặc Giữ độ cao đang được bật. Đảm bảo cả hai chế độ đều được tắt trước khi kích hoạt.
Độ cao dao động
Theo tài liệu Betaflight, độ ổn định độ cao trong khoảng khoảng 1 mét là bình thường. Nó sẽ không ổn định bằng các drone DJI, vốn sử dụng LiDAR và các cảm biến camera khác. Betaflight chỉ dựa vào áp kế.
Gió và vận tốc gió cao cũng có thể gây ra sai lệch, vì luồng khí qua áp kế ảnh hưởng đến áp suất và các phép đo. Bạn có thể giảm điều này bằng cách che áp kế bằng một miếng bọt xốp ô mở nhỏ, cho phép sự thay đổi áp suất nhưng hạn chế luồng khí.
Cảnh báo “POSHOLD FAIL” trên OSD
Điều này thường xảy ra khi:
Bạn không có la bàn và chưa bay thẳng đủ lâu để thiết lập hướng bay, hoặc
Không có đủ vệ tinh GPS được khóa
Quad bay khỏi góc xấu hoặc bay vòng
Nếu quad ngay lập tức bay ở một góc bất thường hoặc bắt đầu bay vòng, thông tin định hướng (từ GPS hoặc cảm biến từ trường) có thể bị sai.
Nếu bạn không dùng cảm biến từ trường, hãy tắt Chế độ Giữ vị trí và bay thẳng 50–100 mét với vận tốc ổn định, ít thao tác roll hoặc yaw, rồi thử lại.
La bàn không chính xác trên quad nhỏ hơn
Tôi đã thử nghiệm cảm biến từ trường trên cả cinewhoop 5 inch và 3 inch; cinewhoop nhỏ hơn nói chung không chính xác bằng 5 inch. Tôi nghĩ điều này có thể liên quan đến kích thước khung nhỏ hơn và mức độ gần GPS với các nguồn nhiễu như động cơ, dây, v.v.
Kết luận: Chế độ Giữ vị trí hữu ích, nhưng chưa phải là tuyệt đối (vẫn còn hạn chế)
Theo kinh nghiệm của tôi, khi Chế độ Giữ vị trí hoạt động, nó hoạt động thực sự tốt. Tuy nhiên, có lúc nó làm những việc kỳ lạ như rung nhịp, đi lang thang, hoặc chỉ lung lay — và đôi khi, nó thậm chí không hoạt động.
Đây là một tính năng mạnh mẽ và thực sự hữu ích, nhưng nó vẫn chưa hoàn hảo. Bạn nên kiểm tra kỹ lưỡng trước khi dựa vào nó trong các tình huống thực tế.
Cá nhân, tôi sẽ chủ yếu sử dụng nó cho các tình huống khẩn cấp — khi bạn cần tháo kính FPV hoặc để lại điều khiển từ xa trong một thời gian ngắn. Việc đó đã đủ để cứu mạng. Tuy nhiên, tôi sẽ không tin tưởng nó để lơ lửng trên đầu người mà không kiểm soát quad một cách tích cực. Hãy dùng lẽ thường.
Bình luận
Đăng nhập để tham gia bình luận.